Système intégré Delta Robot
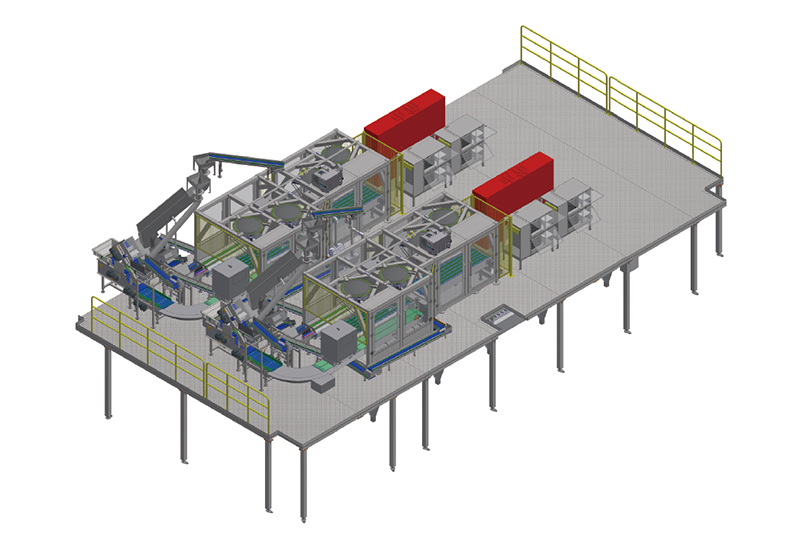
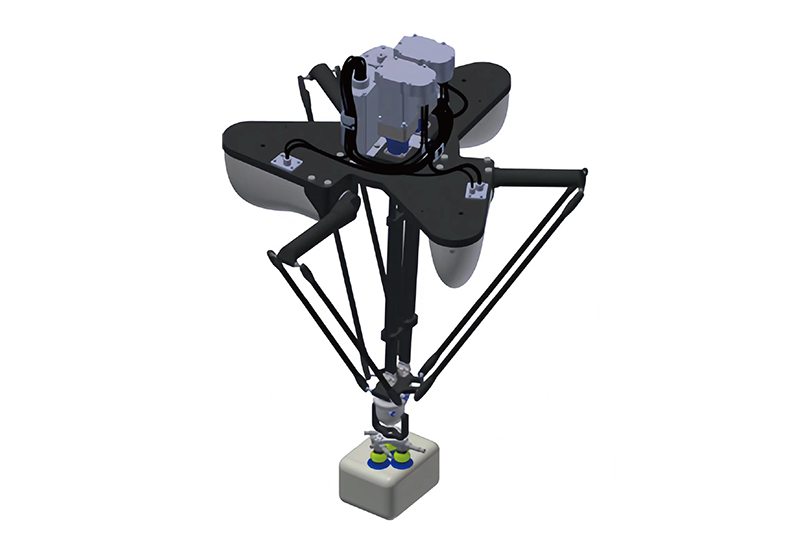
Les emballages intérieurs non ordonnés sont extraits de la zone de stockage. Après tri par le servo-répartiteur, leur position est identifiée par le système de vision. Lors du passage dans la machine d'emballage, le système de vision transmet l'information au robot araignée, qui saisit et place les produits dans l'emballage extérieur correspondant.
Application
Convient pour trier, identifier et saisir les produits d'emballage intérieur non ordonnés sous forme de bouteilles, de tasses, de barils, de sachets, tels que le thé au lait en poudre, les vermicelles, les nouilles instantanées, etc., et les placer à l'intérieur de l'emballage extérieur.
Dessin 3D


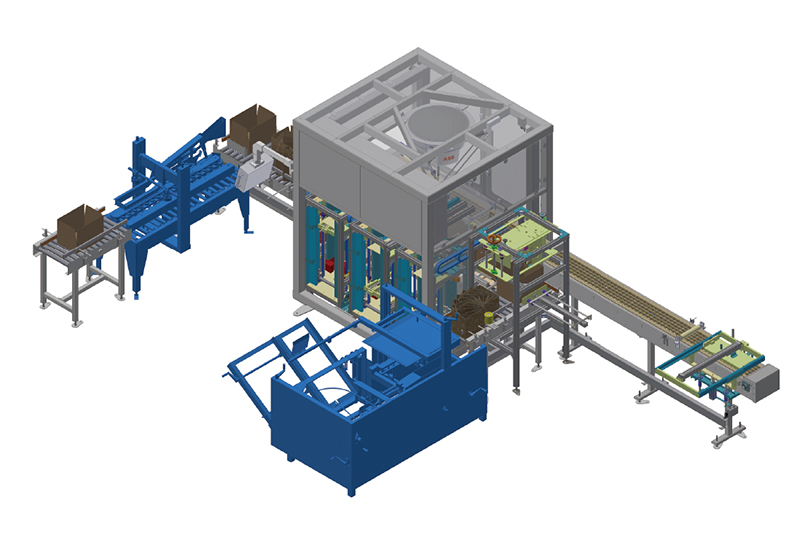
Ligne d'emballage
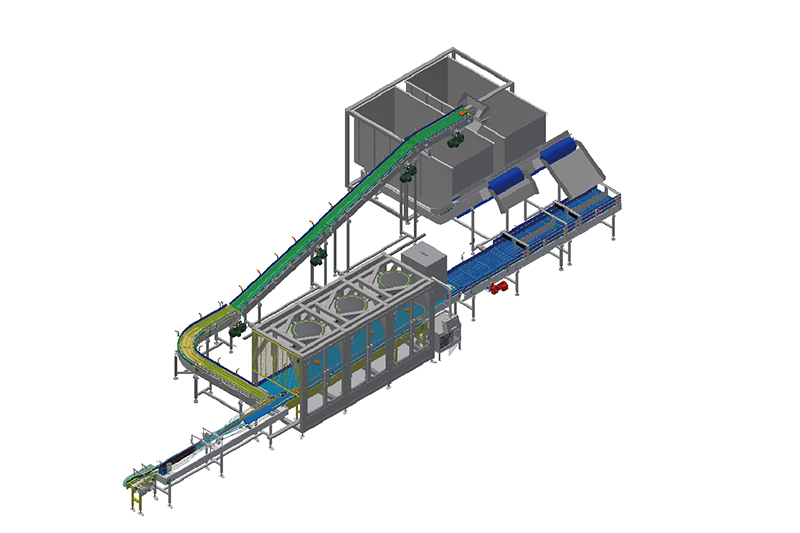
Ligne de décryptage

Configuration électrique
| PLC | Siemens |
| VFD | Danfoss |
| Servomoteur | Elau-Siemens |
| Capteur photoélectrique | MALADE |
| Composants pneumatiques | SMC |
| écran tactile | Siemens |
| Appareils basse tension | Schneider |
| Terminal | Phénix |
| Moteur | COUDRE |
Paramètre technique
| Modèle | LI-RUM200 |
| Vitesse stable | 200 pièces/min |
| Alimentation électrique | 380 V CA ±10 %, 50 Hz, triphasé + N + PE. |
Plus de vidéos
- Ligne de tri, d'alimentation, de démêlage et d'emballage robotisée Delta






